


![]() PDF
PDF
Key takeaways:
- Siemens PLM Software (Siemens) has a deep understanding of the verification and validation challenges faced by the automotive industry related to safety certification of autonomous vehicles.
- Siemens offers numerous solutions for simulating accident scenarios, active safety sensors, sensor-fusion, systems-of-systems, system-on-chip, functional safety, vehicle dynamics, and robust control.
- Simulation offerings by Siemens accelerate the development of autonomous vehicles (AVs) by: i) generating a large set of realistic accident scenarios, ii) reliably simulating the response of complex systems, and iii) optimizing system-performance while minimizing energy consumption.
- Simulation offerings by Siemens are not only helping manufacturers develop safe and certifiable AVs, they also are versatile for developing innovative vehicle architectures and interior concepts that could help develop new autonomous mobility experiences.
The Vision of Autonomous Vehicles and the Certification Challenge
The capability of integrating advanced sensors in automobiles, along with the computational power that can enable real-time artificial intelligence, is driving the development of autonomous road vehicles. The expectation is that crash-avoidance capabilities will significantly reduce fatalities and severe injuries, and, the ability to plan routes and maneuver through traffic will mitigate congestion and environmental pollution, while reducing occupant stress and increasing productivity.
One can imagine that once autonomous road vehicles are certified as safe, they will become platforms for the future innovation of entirely new experiences and business models not realizable today. However, several crucial elements such as validation of customers’ expectations, road and traffic scenarios to be negotiated by the vehicles, verification of the functional and non-functional requirements, as well as certification of vehicles as roadworthy over their life, are still evolving. The most crucial is safety assurance in complex traffic scenarios which include driven and parked vehicles, bicycles, pedestrians, traffic signals, and detour postings, in different light and weather conditions. Although drivers have been dealing with complex road and traffic situations for over a century, translating that into artificial intelligence which relies on advanced sensors and sensor-fusion, remains challenging.
For the last 8 or 9 years, manufacturers, suppliers, and startups worldwide have been testing automated and autonomous vehicle-prototypes on public roads to better understand the interaction between their research vehicles and the current driving environment. Over the same period, controlled traffic scenarios have also been studied to develop test-procedures for critical maneuvers most relevant for safety. However, these islands of information are not enough individually to give the necessary insights and, there is limited pooling of those insights between potential vehicle manufacturers, although a few autonomous vehicle consortia do exist. According to one estimate[1], developing AVs based purely on physical prototype-testing would require several billion driven-miles, making it infeasible for guaranteeing safe designs.
The certification of AVs will need much more data, pertaining to their safe performance in all driving environments than is available today. Developing autonomous vehicles based purely on physical prototype-testing is not only proving cost-prohibitive, it is also delaying their production, sales, and benefits. To accelerate the development and the demonstration of safe-functioning AVs, a simulation-based approach should be pursued. Physical testing of prototypes should be conducted only after virtual conception, design, verification, and validation have successfully been achieved.
Simulation Needs of Autonomous Vehicle Design
AVs need advanced sensors such as RADAR, LIDAR, and cameras to identify the road, traffic, pedestrians, signals, sign posts, and obstacles in addition to the sensors that monitor the changing state of the vehicle. AVs also need real-time computational capability for perception, decision-making, motion-planning, and motion control. These capabilities demand more sensors, electronics, and software than current conventional vehicles, which already use at least 30 sensors, 10 electronic control units (ECUs), and 50+ million lines of software.
The main challenges of designing AVs are:
- Development of robust algorithms for reliably perceiving the rapidly evolving road and traffic scenarios
- Development of reliable sensor-fusion algorithms for elevating confidence in the interpreted information, despite the limitations of individual sensors in complex traffic and weather conditions
- Robust integration of autonomous driving sensors and ECUs with the other systems that perform functions commonly expected in a modern vehicle
Considerable creative effort towards overcoming these challenges has been expended by many organizations across the world that are working on developing AVs. However, the need to substantially accelerate and validate this effort through simulation remains.
A hierarchical set of mathematical models extending from system-on-chip (SoC) performance to entire AV response in its driving environment, including intermediate models that enable swapping of hardware (HW) and software (SW) elements in hardware-in-loop (HIL) and software-in-loop (SIL) analyses, is imperative. Conceiving and proving designs, based on a series of hierarchical layers of simulations is not only feasible with the computational power and simulation tools available today, it should be the first step that innovators take when developing complex systems such as AVs. The following are the focus areas for developing robust AVs:
- Sensing of environment surrounding the vehicle
- Perception, planning, and decision-making for vehicle control
- Actuation for motion control
- Driving environment and traffic modeling for simulated testing
- Vehicle performance and dynamics
- System level design, verification, validation, functional safety, security
- Vehicle level design, verification, validation, certification / homologation
Realistic, validated mathematical models of sensors such as RADAR, LIDAR, and cameras are needed for developing vehicle models that can interact virtually with the environment and traffic for studying potential driving and accident scenarios.
The ability to perceive the environment, plan the incremental path, and make decisions about controlling the motion in a continuously changing environment is a human capability that needs to be emulated through artificial intelligence. This involves millions of lines of code whose reliability is at the heart of the safe operation of AVs. Sensor-fusion is a major part of the algorithm development because of the need for robust perception despite some individual sensors not performing reliably due to natural restrictions or faulty outputs.
Simulation Capability from Siemens for Autonomous Vehicles Design
Siemens’ simulation capabilities from acquisitions of LMS, CD-adapco, Polarion, Mentor, TASS, Infolytica, Sarakol and other solutions integrated with the other offerings, help accelerate the development of AVs. Their main idea is to explore the boundaries of the problem domain using a large number of digital simulations combined with physical tests to explore subsystems virtually before going to physical vehicle testing. This creates an environment in which the digital representations are enriched based on physical tests and the physical components and subsystems are improved based on numerical simulations.
Siemens’ Simcenter PreScanTM pre-crash analysis tools offer realistic models for several sensors such as mono and stereo cameras, fisheye camera, RADAR, LIDAR, and dedicated short range communication (DSRC) devices. These sensor models are implemented with vehicle dynamics models by automotive OEMs and suppliers for simulating performance of vehicles in mapped environments, such as city streets and highways and the American Center for Mobility of which Siemens is a partner. Siemens also offers simulation tools such as FloEFD, FloTHERM, Simcenter 3D, and Xpedition to support detailed sensor development to ensure their durability under practical considerations of vehicle-integration, while optimizing the number and the size of the sensors in terms of performance and cost.
The unfiltered outputs from the sensor models and physical sensors can be fed into Siemens’ centralized data processing platform DRS 360TM. The centralized processing and the acceptance of unfiltered sensor outputs significantly mitigates latency issues thus improving real-time control. The sensor outputs are fused together for perceiving the road, traffic, and other occupants, and for classifying and tracking them as the vehicle moves. The platform accommodates a wide array of sensors from leading suppliers for delivering other key functionality in addition to sensor-fusion such as event detection, semantic perception of objects, situational awareness, path planning, and actuator control.
The Siemens approach to AVs is through the interaction of two digital-twins, one for the vehicle and one for the environment and traffic. The digital-twin for the environment and traffic is created in Simcenter PreScan. The real video images are taken into Simcenter PreScan and converted into synthetic environments for segmentation into road edges, buildings, vehicles, bicycles, and roadside features. Siemens also can integrate vehicle videos from over 30,000 accidents in the German In-depth Accident Study (GIDAS). The environment and traffic digital-twin formed this way can accept the vehicle digital-twin and be used to analyze millions of accident scenarios to establish the cases necessary for the next level of studies in verification and validation.
The SoC development is carried out using Mentor Veloce emulator for integrated circuit (IC) design, which uses a special purpose supercomputer for validating performance in terms of computation power and temperature. The Simcenter digital twin of the AV is used to validate the performance of the IC designs. The objective is to work on the requirements, the development, and the testing of ICs virtually, very early in the overall development process at the SoC suppliers, the Tier 1 suppliers, and the OEMs.
Embedded software development is carried out in parallel with the mechanical and the electrical systems development via a model-based systems engineering approach using Siemens’ Application Lifecycle Management offering, Polarion. The development begins with the requirements followed by the software and electrical systems architecture development, software development, software integration, and software testing. The process is orchestrated by Teamcenter and supported by other tools such as Capital, Volcano, and Simcenter Embedded Software Designer.
The algorithm development for trajectory planning and motion control is supported by Siemens through their consultancy service which has expertise in Model Predictive Control (MPC). In MPC, the prediction model is based on input constraints and dynamic constraints, while the control objectives are derived for the requirements of the smoothness of the trajectory, safe cornering, and fuel consumption. The dynamic trajectory optimization in MPC is achieved by applying either the receding horizon approximation or the sequential quadratic programming.
Complex interdisciplinary engineering of mechanical, electrical, and software content is needed to develop prototypes whose functional safety has been carefully considered. Essentially, systems engineering must be employed to ensure the safe functioning of prototype AV—for testing them on public roads, test-beds, and validation of concepts.
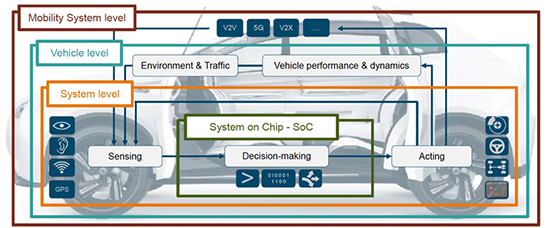
Figure 1—Siemens’ Approach to Autonomous Vehicle Design
(Courtesy of Siemens PLM Solutions)
Siemens enables systems engineering of AVs based on its product innovation platform which covers SoC development, autonomous driving computation, embedded software development, control algorithms development, sensor and environment modeling, systems integration, and vehicle development and occupant response (Figure.1).
Summary
Over the years, CIMdata has kept track of the evolution of automated and autonomous vehicles and the technological inventions that are enabling them. CIMdata is also closely following the challenges created by the design, verification, validation, and certification of AVs. Today, these activities for conventional automobiles are done virtually to a large extent. That is possible because the information available about their interaction with roads and the traffic is exhaustive, and their certification process is well-established. This is not the case with AVs. Their interaction with roads and traffic is not well understood. They need to be studied in millions of road and traffic scenarios before we can incrementally improve their capability for perception, path-planning, and motion control to acceptable levels.
Siemens Simcenter PreScan, which converts environment and traffic videos into synthetic pre-crash scenarios for developing the digital twin of the road and the traffic, is a practical tool for substantially reducing the number of miles that an AV prototype needs to physically drive, to identify and validate critical traffic and accident scenarios. Furthermore, Siemens’ offerings that support the development of digital twins for conventional vehicles are extendable to the development of AVs. Siemens offerings can help simulate the response of components, subsystems, and systems going from SoC to the combined digital twins of the AVs and the driving environment. This capability of modeling and simulation at the micro and the macro levels is crucial for design, verification, and validation every step of the way from silicon, SoC, IC boards, ECUs, subsystems, and the entire vehicle to the vehicle within the environment in which it is expected to operate.
Finally, the simulation capabilities of Siemens associated with generative design, advanced materials, and vehicle interior design can help create several new experiences related to mobility in the future. As one of the main benefits of AVs is crash avoidance, the material included in vehicle body structures related to traditional crashworthiness designs could be reduced. Additionally, the passive safety protection of vehicle occupants constrains interior designs today. With AVs capable of making evasive maneuvers, the closing speeds with other vehicles in the event of a crash should be substantially lower than today, and that can help reduce the weight of interior elements such as seats and passive restraints. Many options for creative designs for vehicle interiors and overall vehicle architecture will become possible once AVs can be validated as roadworthy. However, establishing roadworthiness of AVs is the first hurdle—a hurdle that the broad set of Siemens offerings would be able to help accelerate that development substantially.

